| RTS (Real Time Statistics) Name |
Example |
Unit |
Range |
Explanation |
|
|
|
|
|
|
| Date: Thu Apr 1 12:09:06 2004 |
|
|
|
Date/Time indication for this data set |
| ENDEXAM: ID 50083 |
|
|
|
exam ID |
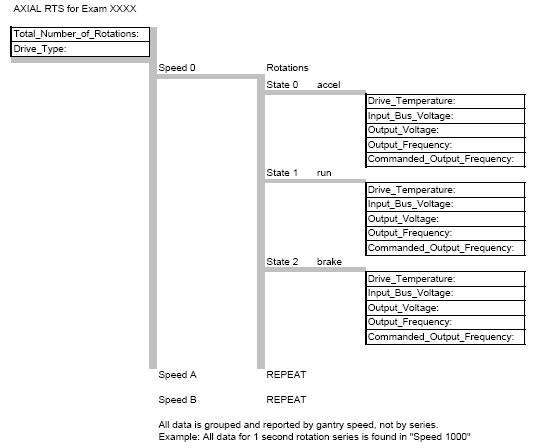
| Total_Number_of_Rotations: |
1966 |
count |
|
rotations for this exam |
| Drive_Type: |
0 |
|
|
|
| Rotation:: |
|
|
|
|
| Speed: |
0 |
msec per rotation |
|
Scout speed defined as zero. All data in this section is for all series
run at this speed for this exam. |
| Rotations_at_this_Speed: |
0 |
count |
|
Number of rotations at this speed for this exam. |
| State_Group:: |
|
|
|
|
| State: |
0 |
flag |
|
Gantry state 0=accel, 1=run, 2=brake |
| Drive_Temperature: |
NaN |
Degrees C |
|
”Not a Number” indicates no scans run at this speed. |
| Input_Bus_Voltage: |
NaN |
Volts |
|
”Not a Number” indicates no scans run at this speed. |
| Output_Voltage: |
NaN |
Volts |
|
”Not a Number” indicates no scans run at this speed. |
| Output_Frequency: |
NaN |
Hertz |
|
”Not a Number” indicates no scans run at this speed. |
| Commanded_Output_Frequency: |
NaN |
Hertz |
|
”Not a Number” indicates no scans run at this speed. |
| State_Group:: |
|
|
|
|
| State: |
1 |
flag |
|
Gantry state 0=accel, 1=run, 2=brake |
| Drive_Temperature: |
50 |
Degrees C |
|
|
| Input_Bus_Voltage: |
590.723 |
Volts |
|
|
| Output_Voltage: |
98.94 |
Volts |
|
|
| Output_Frequency: |
25.994 |
Hertz |
|
|
| Commanded_Output_Frequency: |
65 |
Hertz |
|
|
| State_Group:: |
|
|
|
|
| State: |
2 |
flag |
|
Gantry state 0=accel, 1=run, 2=brake |
| Drive_Temperature: |
NaN |
Degrees C |
|
|
| Input_Bus_Voltage: |
NaN |
Volts |
|
|
| Output_Voltage: |
NaN |
Volts |
|
|
| Output_Frequency: |
NaN |
Hertz |
|
|
| Commanded_Output_Frequency: |
NaN |
Hertz |
|
|
| Rotation:: |
|
|
|
|
| Speed: |
1000 |
msec per rotation |
|
All data in this section is for all series run at this speed for this
exam. Ie. All series at 1 sec. |
| Rotations_at_this_Speed: |
219 |
count |
|
Number of rotations at this speed for this exam. |
| State_Group:: |
|
|
|
|
| State: |
0 |
flag |
|
Gantry state 0=accel, 1=run, 2=brake |
| Drive_Temperature: |
52.105263 |
Degrees C |
|
|
| Input_Bus_Voltage: |
706.641789 |
Volts |
|
|
| Output_Voltage: |
140.573 |
Volts |
|
|
| Output_Frequency: |
41.527553 |
Hertz |
|
|
| Commanded_Output_Frequency: |
25.999 |
Hertz |
|
|
| State_Group:: |
|
|
|
|
| State: |
1 |
flag |
|
Gantry state 0=accel, 1=run, 2=brake |
| Drive_Temperature: |
51.833333 |
Degrees C |
|
|
| Input_Bus_Voltage: |
602.297517 |
Volts |
|
|
| Output_Voltage: |
98.725217 |
Volts |
|
|
| Output_Frequency: |
26.339633 |
Hertz |
|
|
| Commanded_Output_Frequency: |
25.999 |
Hertz |
|
|
| State_Group:: |
|
|
|
|
| State: |
2 |
flag |
|
Gantry state 0=accel, 1=run, 2=brake |
| Drive_Temperature: |
51 |
Degrees C |
|
|
| Input_Bus_Voltage: |
593.2495 |
Volts |
|
|
| Output_Voltage: |
10.8375 |
Volts |
|
|
| Output_Frequency: |
715823.7168 |
Hertz |
|
|
| Commanded_Output_Frequency: |
6.499 |
Hertz |
|
|
|
|
|
|
|
|
| Data continues to repeat for each speed. |
|
|
|
|